Expo
view channel
view channel
view channel
view channel
view channel
view channel
view channel
Radiography
UltrasoundNuclear MedicineGeneral/Advanced ImagingImaging ITIndustry News
Events

- AI Mammography Tools Detect Early Breast Cancer Signs Years Before Diagnosis
- Rapid X-Ray Test Quantifies Pulmonary Regurgitation After Tetralogy of Fallot Repair
- AI Tool Flags Osteoporosis Risk from Routine Chest X-Rays
- Simple Chest X-Ray Measure Predicts Survival After Lung Cancer Surgery
- AI Detection Tool Improves Identification of Lobular Breast Cancer
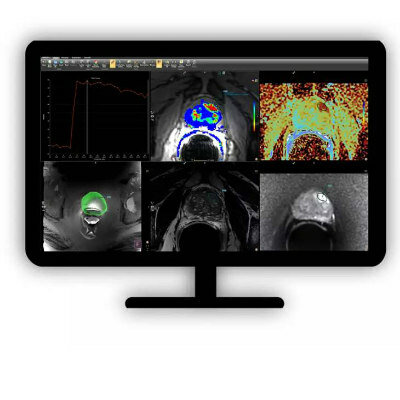
- International Study Assesses AI for Prostate Cancer MRI Interpretation
- AI Approach Could Shorten Advanced Brain MRI Scans by Up to 90%
- Cardiac MRI Measure Improves Risk Prediction in Tricuspid Regurgitation
- AI System Improves Accuracy of Cardiac MRI Interpretation
- Deep Learning Model Predicts Alzheimer’s Disease Outcomes from Baseline MRI
- Targeted PET Platform Guides Osteosarcoma Resection and Margin Verification
- Portable PET System Enables Real-Time Bedside Guidance for Biopsies and Ablations
- AI Model Predicts Radiation Dose Before Prostate Cancer Therapy
- Vault-Free Radiosurgery Platform Expands Access to Cranial Tumor Care
- MR-Guided Cardiac Mapping System Enables Radiation-Free Procedures
- Hybrid Imaging Platform Reveals How Sleep Supports Brain Waste Removal
- AI Robotic Ultrasound System Automates Echocardiography and Improves Consistency
- Whole Cross-Section Ultrasound System Enables Operator-Independent Imaging
- New Ultrasound AI Tool Supports Rapid Prenatal Assessment
- New Consensus Standardizes Ultrasound-Based Fatty Liver Assessment
- CT-Derived Biomarker Predicts Outcomes in Gastric Cancer
- AI Tool Enhances Response Assessment and Survival Prediction in Pleural Mesothelioma
- AI Tool Enables Real-Time Diffuse Optical Tomography for Brain Lesion Detection
- New SPECT/CT Method Differentiates Inflammation from Fibrosis in Interstitial Lung Disease
- Whole-Body PET/CT Tracks Metabolic Changes After Bariatric Surgery
- Interactive AI Tool Supports Explainable Lung Nodule Assessment
- Breast Imaging Software Enhances Visualization and Tissue Characterization in Challenging Cases
- New Google Cloud Medical Imaging Suite Makes Imaging Healthcare Data More Accessible
- Global AI in Medical Diagnostics Market to Be Driven by Demand for Image Recognition in Radiology
- AI-Based Mammography Triage Software Helps Dramatically Improve Interpretation Process
- GE HealthCare Highlights AI-Supported Radiation Therapy Tools at ESTRO 2026
- Nuclear Medicine Set for Continued Growth Driven by Demand for Precision Diagnostics
- GE HealthCare and NVIDIA Collaboration to Reimagine Diagnostic Imaging
- Patient-Specific 3D-Printed Phantoms Transform CT Imaging
- Siemens and Sectra Collaborate on Enhancing Radiology Workflows
- AI Mammography Tools Detect Early Breast Cancer Signs Years Before Diagnosis
- Rapid X-Ray Test Quantifies Pulmonary Regurgitation After Tetralogy of Fallot Repair
- AI Tool Flags Osteoporosis Risk from Routine Chest X-Rays
- Simple Chest X-Ray Measure Predicts Survival After Lung Cancer Surgery
- AI Detection Tool Improves Identification of Lobular Breast Cancer
- International Study Assesses AI for Prostate Cancer MRI Interpretation
- AI Approach Could Shorten Advanced Brain MRI Scans by Up to 90%
- Cardiac MRI Measure Improves Risk Prediction in Tricuspid Regurgitation
- AI System Improves Accuracy of Cardiac MRI Interpretation
- Deep Learning Model Predicts Alzheimer’s Disease Outcomes from Baseline MRI
- Targeted PET Platform Guides Osteosarcoma Resection and Margin Verification
- Portable PET System Enables Real-Time Bedside Guidance for Biopsies and Ablations
- AI Model Predicts Radiation Dose Before Prostate Cancer Therapy
- Vault-Free Radiosurgery Platform Expands Access to Cranial Tumor Care
- MR-Guided Cardiac Mapping System Enables Radiation-Free Procedures
- Hybrid Imaging Platform Reveals How Sleep Supports Brain Waste Removal
- AI Robotic Ultrasound System Automates Echocardiography and Improves Consistency
- Whole Cross-Section Ultrasound System Enables Operator-Independent Imaging
- New Ultrasound AI Tool Supports Rapid Prenatal Assessment
- New Consensus Standardizes Ultrasound-Based Fatty Liver Assessment
- CT-Derived Biomarker Predicts Outcomes in Gastric Cancer
- AI Tool Enhances Response Assessment and Survival Prediction in Pleural Mesothelioma
- AI Tool Enables Real-Time Diffuse Optical Tomography for Brain Lesion Detection
- New SPECT/CT Method Differentiates Inflammation from Fibrosis in Interstitial Lung Disease
- Whole-Body PET/CT Tracks Metabolic Changes After Bariatric Surgery
- Interactive AI Tool Supports Explainable Lung Nodule Assessment
- Breast Imaging Software Enhances Visualization and Tissue Characterization in Challenging Cases
- New Google Cloud Medical Imaging Suite Makes Imaging Healthcare Data More Accessible
- Global AI in Medical Diagnostics Market to Be Driven by Demand for Image Recognition in Radiology
- AI-Based Mammography Triage Software Helps Dramatically Improve Interpretation Process
- GE HealthCare Highlights AI-Supported Radiation Therapy Tools at ESTRO 2026
- Nuclear Medicine Set for Continued Growth Driven by Demand for Precision Diagnostics
- GE HealthCare and NVIDIA Collaboration to Reimagine Diagnostic Imaging
- Patient-Specific 3D-Printed Phantoms Transform CT Imaging
- Siemens and Sectra Collaborate on Enhancing Radiology Workflows


")



 2015, (B) 2018, (C) 2019, and (D) 2021. In (E) 2022, a new mass developed in the left breast at the 6-o’clock position (arrow), with a (F) corresponding irregular mass at US (arrow). Subsequent US-guided core needle biopsy yielded invasive ductal carcinoma, grade 2. The deep learning 5-year risk scores gradually increased from 2.0 (2015) to 2.1 (2018), 3.4 (2019), 3.6 (2021), and 15.3 (2022). CMFN = centimeters from nipple, LT = left, TRANS = transverse (Photo courtesy of Radiological Society of North America)")
 score changes over time in two individuals with screen-detected cancer. Full-field digital mammograms show craniocaudal (top) and mediolateral (bottom) views of the left and right breast (Photo courtesy of Radiological Society of North America)")
 to evaluate the severity of Pulmonary Regurgitation (PR), a common complication after treatment of the congenital heart disease Tetralogy of Fallot. The analysis only requires the patient to hold their breath for seven seconds for a sequence of images of their heart to be taken. The images are then analyzed and extracted into a waveform that can show the severity of PR. The new technique\\\'s detection accuracy of severe PR is 93%, with a sensitivity of 93% and a specificity of 94%. (Photo courtesty of Kyushu University/Yuzo Yamasaki)")

 and blood vessels morphology (Photo courtesy of Dr. Eddy Solomon/Technion - Israel Institute of Technology)")
")
")
")
")
 and the tracer highlighting the glymphatic system (red-yellow) along the brain’s surface and drainage routes—imaged through the intact skull with 3D-PAULM. (Photo courtesy of Duke University)")
 (Garrett, D.C., Xu, J., Oh, D. et al. Nat. Biomed. Eng (2026). https://doi.org/10.1038/s41551-026-01660-4)")
![Image: (A-C) Representative whole-body maximum-intensity projection images and regional fused PET/CT images from three histologically confirmed osteosarcoma patients who underwent paired [68Ga]Ga-B7-H3-BCH PET/CT and 18F-FDGE PET/CT within 7 days. (D) Multimodal imaging evaluation of patient 3, including X-ray, MRI (T2-weighted imaging, T2WI), CT, and B7-H3 PET/CT. (Photo courtesy of SNMMI)](https://globetechcdn.com/medicalimaging/images/stories/articles/article_images/2026-06-07/294811110_image_1.jpg "Image: (A-C) Representative whole-body maximum-intensity projection images and regional fused PET/CT images from three histologically confirmed osteosarcoma patients who underwent paired [68Ga]Ga-B7-H3-BCH PET/CT and 18F-FDGE PET/CT within 7 days. (D) Multimodal imaging evaluation of patient 3, including X-ray, MRI (T2-weighted imaging, T2WI), CT, and B7-H3 PET/CT. (Photo courtesy of SNMMI)")
 Benchtop portable POC-PET prototype system. (b) Phantom imaging experiment setup. (c) Comparison of conventional full-data MLEM reconstruction with incremental OSEM reconstruction (Image credit: SNMMI)")
")
")
")
")
 on the y = 2.0 cm plane (Horie, S., Yajima, H., Abe, M. et al., Biomedical Engineering Letters (2026). DOI: 10.1007/s13534-026-00578-9)")
")
")
")
")
-pending software for dynamic PET imaging and kinetic modeling, enabling time-based radiotracer analysis for clinical and research decisions (Photo courtesy of GE Healthcare)")
")
")
")


